人形网球机器人来了!由清华大学、银河通用联合打造
近日,一项关于人形机器人打网球的研究成果引发关注。这个名为 LATENT 的机器人,由银河通用、清华大学、北京大学、上海期智研究院、上海人工智能实验室的联合团队共同打造。
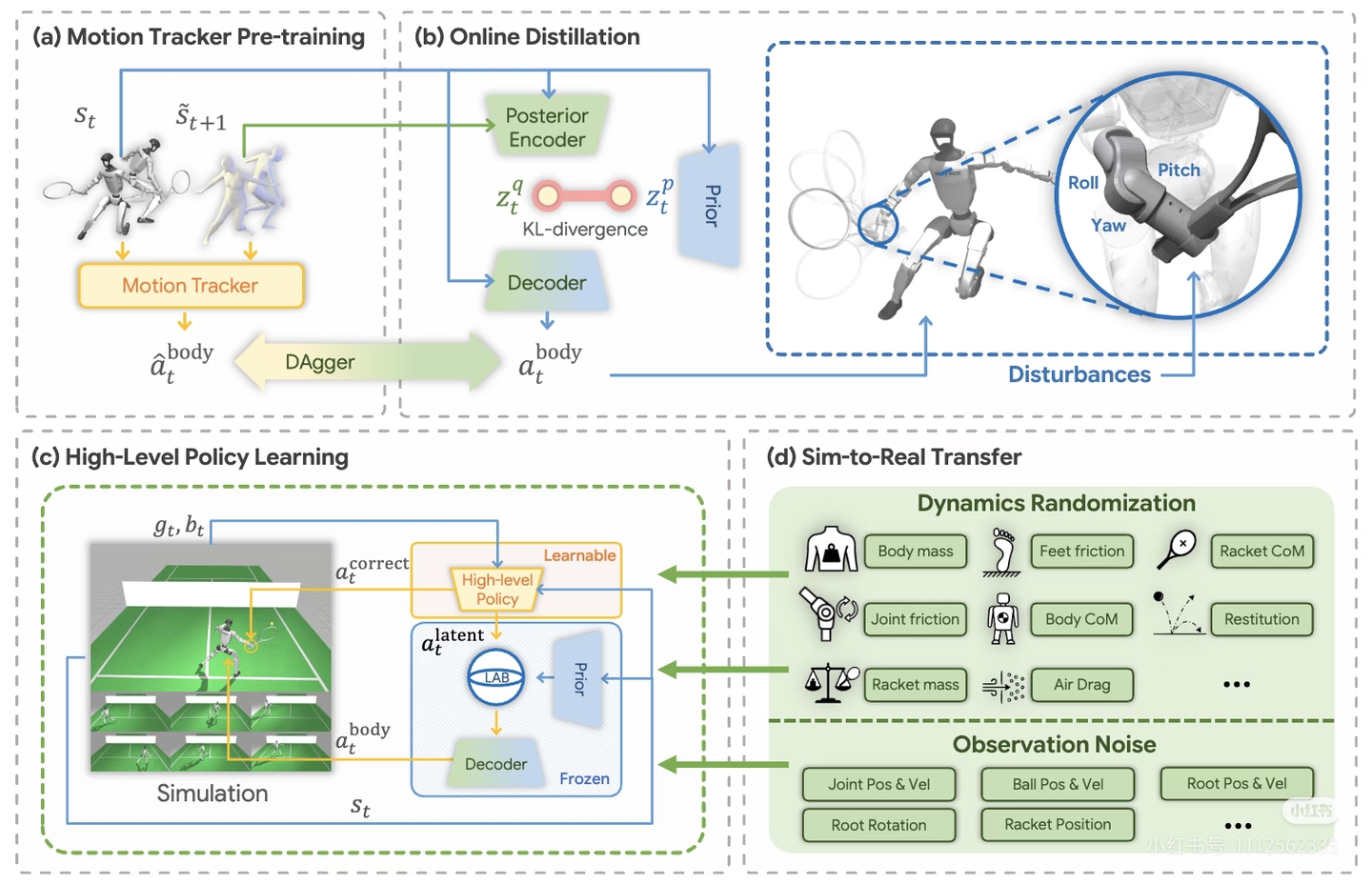
LATENT 全称为“Learning Athletic Humanoid Tennis Skills from Imperfect Human Motion Data”,意为“从非完美人体运动数据中学习运动型人形机器人网球技能”。
研究团队在论文中指出,人类运动员之所以能完成高速网球的竞技对打,依靠的是多样且高动态的运动技能。然而,要在人形机器人上复现这类行为极为困难,核心瓶颈之一,是缺乏完美的类人动作数据或针对网球场景的人体运动学数据作为参考。
为此,团队提出了 LATENT 系统,从非完美的人体运动数据中,学习运动型人形机器人网球技能。这些非完美数据并非来自真实比赛的完整动作序列,而是仅包含打网球时使用的原始技能的运动片段,大大降低了数据采集的难度。
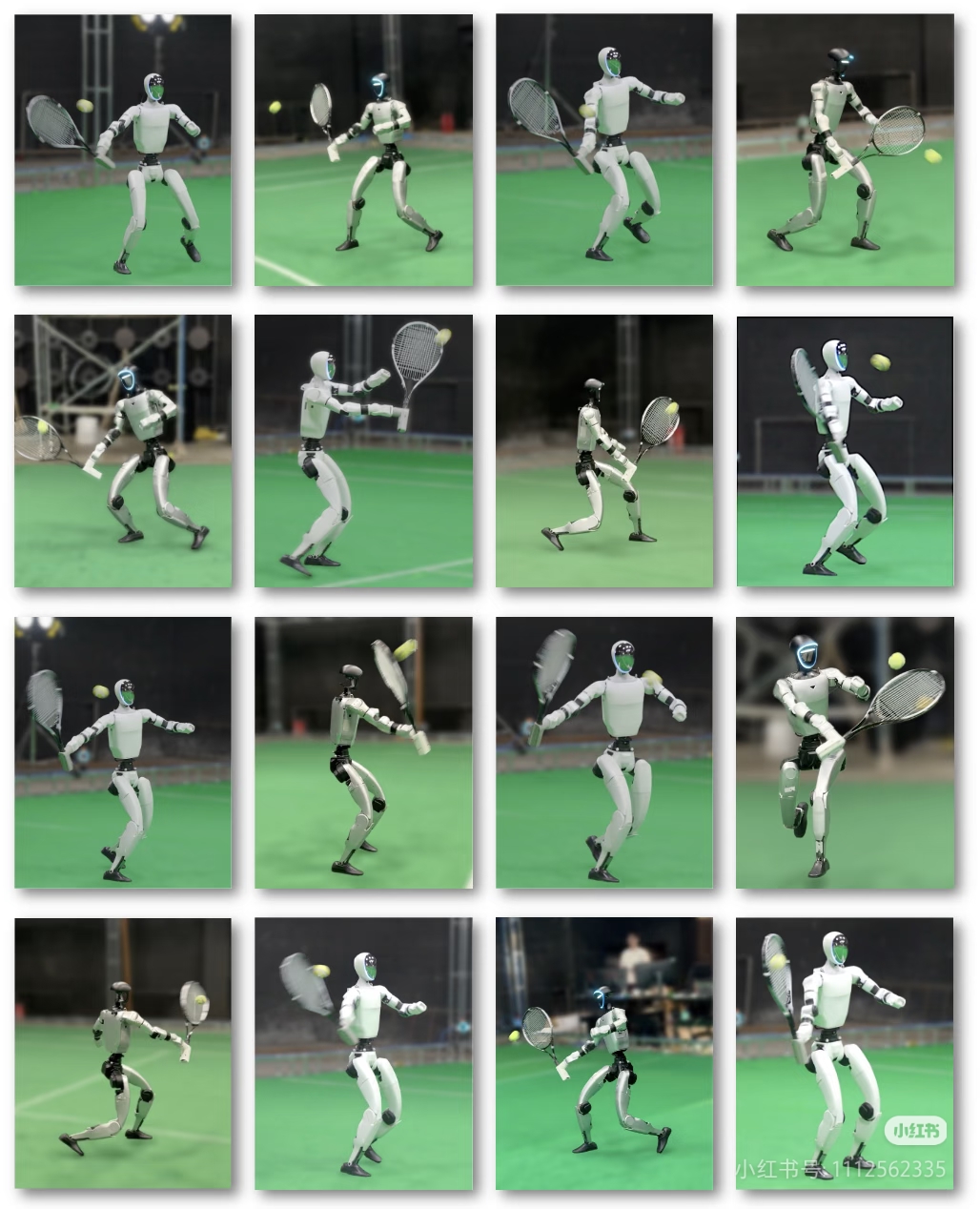
团队的核心洞察在于:尽管这些数据不完美,但这类“准真实”数据依然宝贵,能够提供人类在网球场景中的原始技能信息。经过修正与组合后,机器人学习到的策略,可以在多变条件下持续击打来球,并将球回击至目标位置,同时保持自然的运动风格。
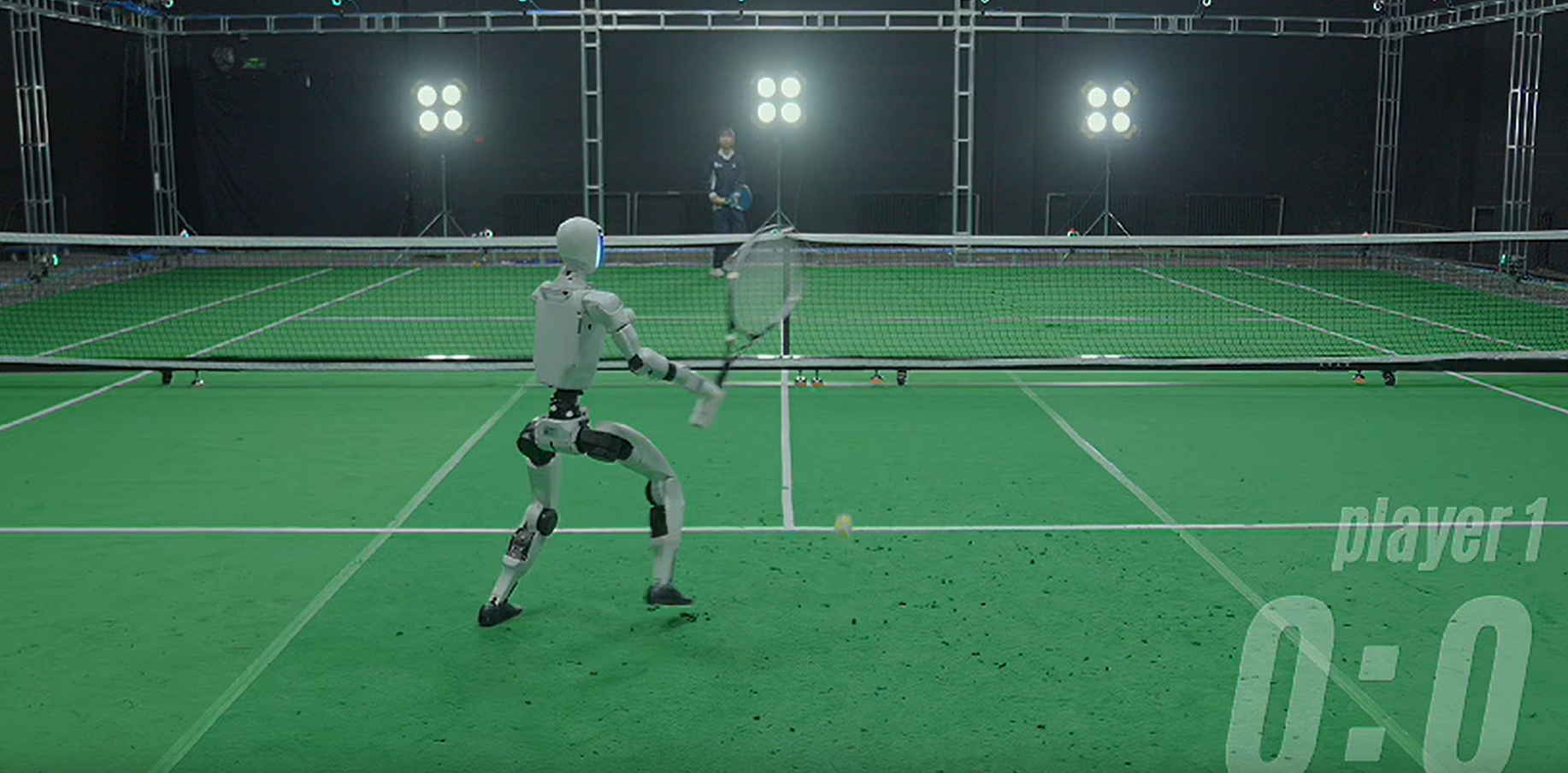
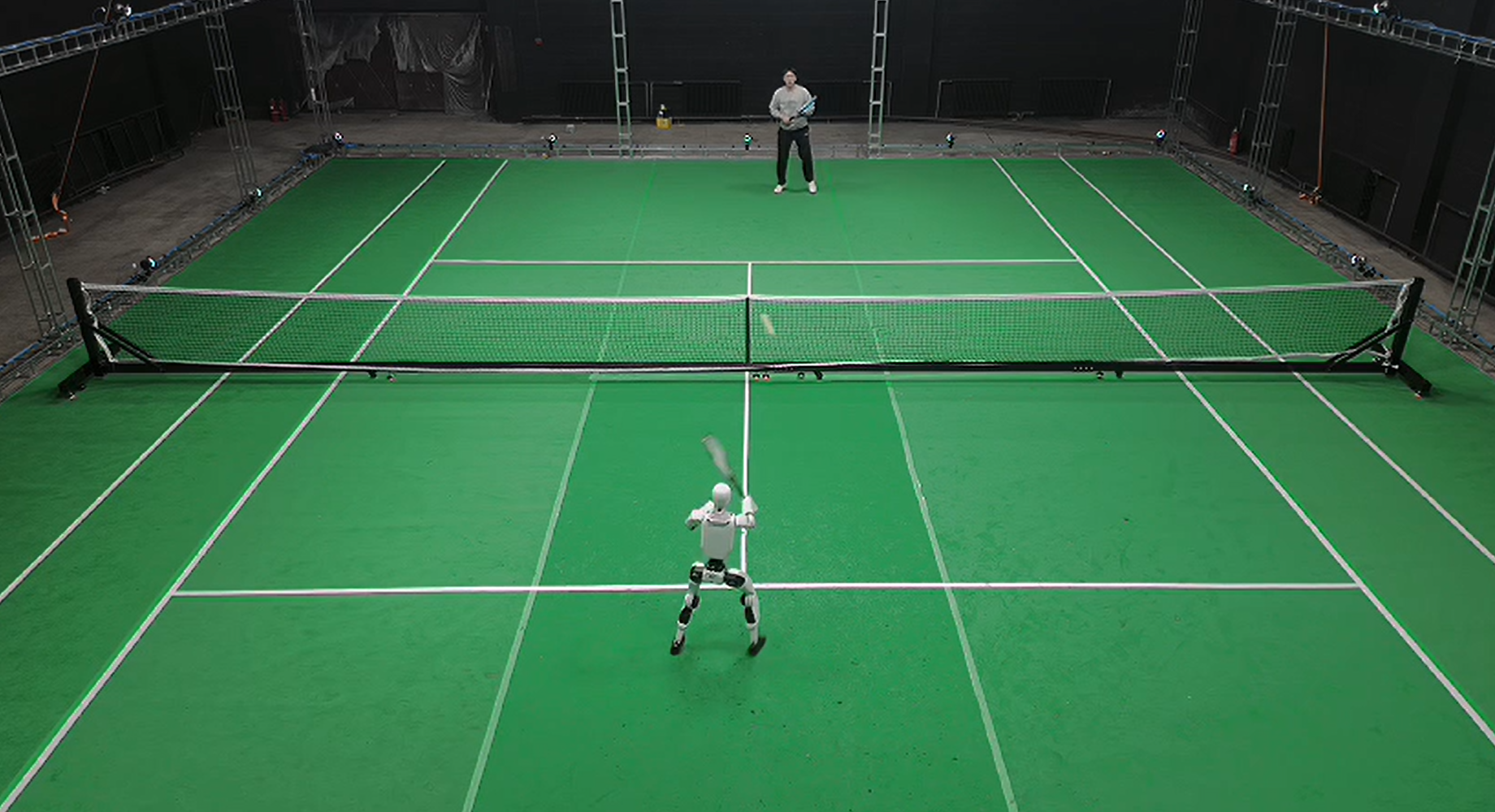
目前,该策略已成功部署在宇树科技的 G1 人形机器人上,并在真实世界取得了令人惊喜的表现——机器人已能够与人类球员稳定地进行多拍对打。
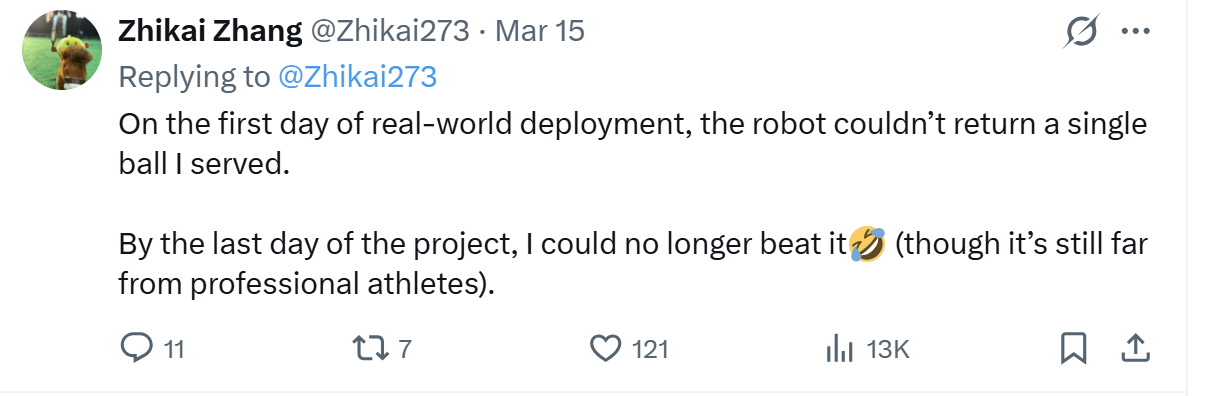
论文第一作者、清华大学博士生 Zhikai Zhang 在社交平台上分享了研发感受:
“实地部署的第一天,我发的球它一个都接不住。到了项目最后一天,我已经打不过它了(虽然距离专业运动员还很远)。”
论文第二作者、清华大学硕士研究生 Haofei Lu 也回顾了项目的历程:
“LATENT 探索了人形机器人在真实网球场景中的动态击球能力。在约 200 平米的真实球场中,机器人需要完成大范围跑动、击球决策与全身协调控制,并稳定回击直径不到 6.5cm 的高速网球。这类高动态任务不仅需要有效的学习算法,更对系统工程与真实部署提出了极高要求。
在这项工作中,我们不仅关注策略学习本身,也投入了大量精力在真实系统的工程落地。从生成式策略训练到真实机器人部署,我们构建并不断迭代完整的 Sim2Real 流程,包括策略推理部署、通信系统稳定性、真实数据驱动的 Real2Sim 迭代、系统标定与环境建模等,使得仿真中学习到的策略能够稳定运行在真实机器人上。
经过约五个月的系统开发与实验迭代,我们在真实世界场地上完成了大量测试,使机器人能够在连续来球中完成跑动、步伐调整与击球动作,并实现稳定回球。我们希望这项工作能够展示:在人形机器人研究中,算法突破与工程系统同样重要,只有通过扎实的真实部署与系统迭代,机器人能力才能真正走出仿真环境,走向现实世界。”
| 图片来源:视频截图
| 信息来源:GitHub;论文作者个人社交媒体账号